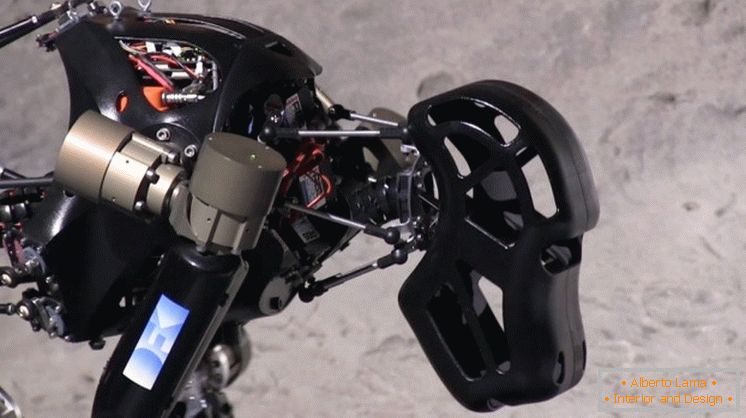
Il Centro di ricerca tedesco per l'intelligenza artificiale (DFKI) e l'Università di Brema stanno lavorando al simian robot iStruct Demonstrator, è classificato come "robot spaziale". Ora le scimmie meccaniche superano i test per camminare ed equilibrarsi in condizioni vicine al rilievo della luna.

Lo studio delle pericolose superfici lunari richiede l'uso di varie forme di movimento, ei ricercatori del DFKI studiano le loro capacità (compresa una combinazione di gambe, ruote e bruchi). I robot simil-scimmia presentano alcuni vantaggi rispetto al supporto a quattro punti con ruote che consente di creare una posizione più stabile quando si superano ostacoli o terreni collinari. Il robot può bilanciarsi sulle zampe posteriori per rilasciare gli arti anteriori per eseguire qualsiasi azione.

Con nuovi interessi internazionali nella missione lunare, c'è una possibilità che iStruct (o uno dei suoi discendenti) sarà in grado di visitare la luna. La colonizzazione della Luna da parte dei robot inizierà con uno sviluppo che può svilupparsi e reagire ragionevolmente in qualsiasi situazione attuale, a questo proposito l'obiettivo del progetto è costruire "intelligenza artificiale avanzata" e un sistema robotico in grado di apprendere e navigare.
Il robot ha una spina dorsale incernierata che collega il tronco e il bacino, dandogli una maggiore flessibilità, così come un sensore di carico per il piede e la caviglia che reagiscono quando sono a contatto con il terreno.
Altre caratteristiche includono:
- 43 motori indipendenti;
- Sei sensori FSR aggiuntivi su parti aperte utilizzate per rilevare gli ostacoli;
- Sensore di coppia a 6 assi;
- Accelerometro digitale a 3 assi, per percepire l'orientamento del piede nello spazio;
- Due sensori di temperatura per compensare le variazioni di temperatura nell'elettronica;
- Sensore magnetico digitale per il controllo angolare di ciascun asse mobile dell'articolazione del piede e della caviglia;
La maggior parte dei robot contiene già molti di questi sensori, ma la spina articolata iStruct (che può funzionare come un trasduttore di coppia a 6 assi) è una sorta di rarità per i robot locomotori che aiutano il movimento a quattro zampe. I sensori nelle articolazioni del piede e della caviglia gli consentiranno di mantenere l'equilibrio su una superficie inclinata.
Nel 2008 e nel 2009, un ingegnere laureato Daniel Kuhn ha lavorato su un robot simile. Una piccola scimmia che era capace di camminare a quattro zampe semplici. Dopo questo progetto, ha iniziato a lavorare su iStruct, che ha una serie di aggiornamenti significativi. Questo è un peso molto più grande, 18 kg (40 libbre) e dimensioni di 66 x 43 x 75 cm (26 x 17 x 29 pollici), e contiene anche 26 gradi di libertà, e alimentato da vari motori elettrici. Il progetto dovrebbe essere completato nel mese di agosto di quest'anno.
Puoi vedere come usa i suoi piedi e caviglie intellettuali camminando e mantenendo l'equilibrio nel video qui sotto. Questo è un piccolo passo per un robot scimmia, ma potenzialmente un passo da gigante per tutta la robotica di design simile.
a piedi
equilibratura
Photogallery Totale | 14 foto